 关键词:
智能制造发展
山东天河科技股份有限公司
关键词:
智能制造发展
山东天河科技股份有限公司
 2023-08-17 16:11:45
2023-08-17 16:11:45
防冲钻孔机器人项目突破了机器人自主行走和智能控制、钻具自主钻进控制、孔区应力随钻感知与动态反演、冲击地压风险评估与防治孔动态优化等技术,完成了矿井防冲钻孔机器人的系统集成,具备钻杆自动装卸和设备远程操控功能,有效解决人机分离和提高钻进效率等问题,实现卸压区域无人化作业,广泛应用于冲击地压危险区域解危卸压钻孔施工等。
该设备结构设计紧凑,宽度仅1.15m,运转灵活,现场适用性强。钻杆箱采用弹夹式结构设计,机械手自由度少,故障率低,满足一次钻进30m需要,实现机械化自动装卸钻杆,钻进过程中不需人工干预。具备300米以外超视距远程可视化操控功能,实现设备操作无人化及人机分离。钻机给进行程1.2m,配备钻孔深度测量及煤体压力检测系统,通过随钻动态监测分析钻机工作过程的各项参数,一方面可以实现扭矩、转速自动调节,减少卡钻抱钻现象,提高钻进效率3倍,另外可实现冲击地压辅助预警与设备故障诊断,有效助推矿山安全生产、减人增效。
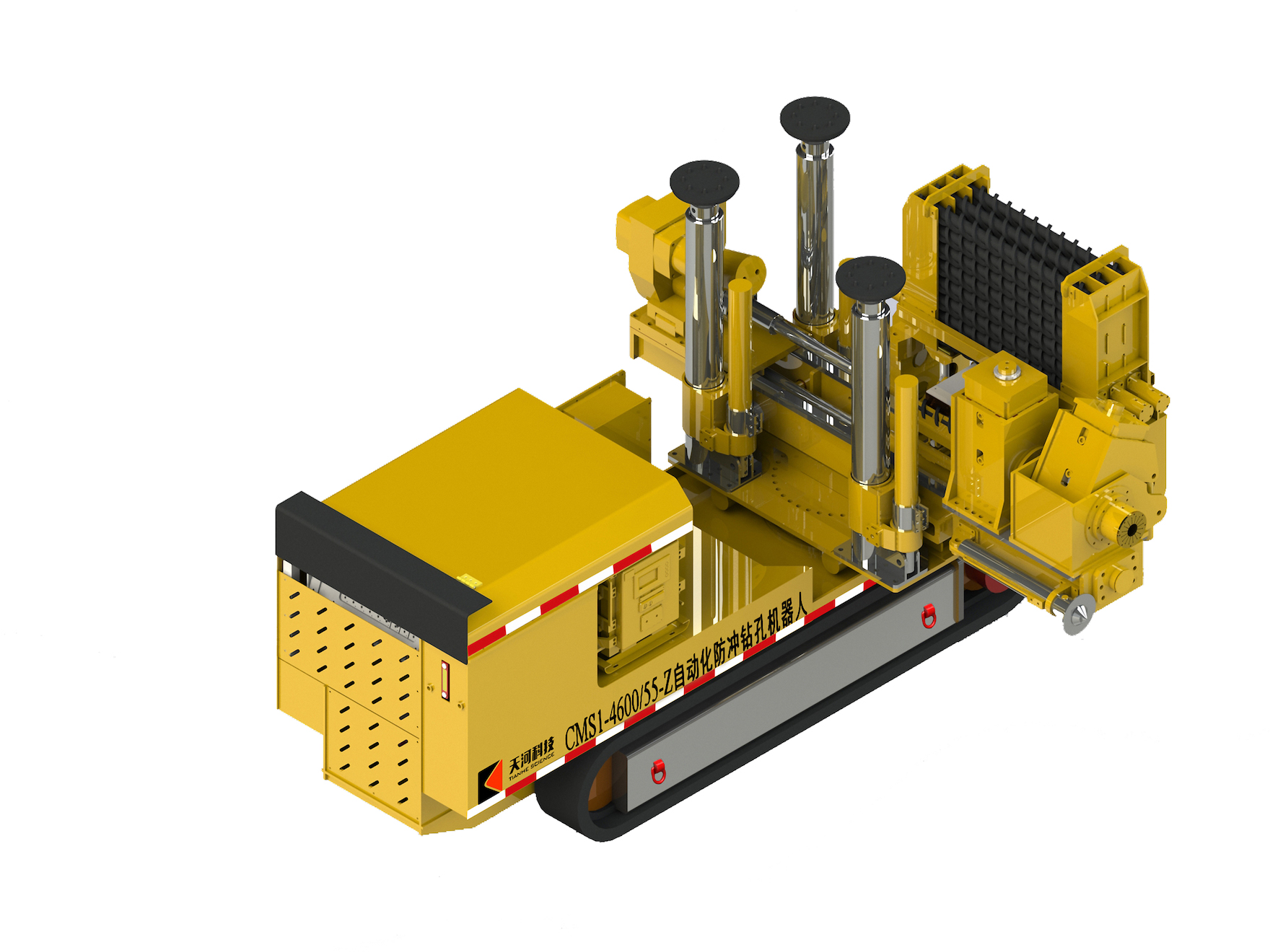
天河科技智能防冲钻孔机器人




世界智能产业博览会
津ICP备17008349号-3![]() 津公网安备 12010302002098号 官方声明
津公网安备 12010302002098号 官方声明


 脑青松认知功能数字疗法:基于语音识别和人工智能的认知功能精准评估和个性化干预
脑青松认知功能数字疗法:基于语音识别和人工智能的认知功能精准评估和个性化干预