

- �� ҳ
- ������ѡ
- �λ�ע��
- �����ݽ��α�
- ��������
-
�ר��
- �û�����
- ���»
- ������ҵ���а�
- ���ܿƼ�������
- ���ܿƼ�չ
- ˫��̸
-
����ع�
-
��������
δע���û����Ƚ��� ע��
 �ؼ��ʣ�
���ܿƼ�
�ؼ��ʣ�
���ܿƼ�
 2021-04-27 17:45:57
2021-04-27 17:45:57
 �ղ�
�ղ�

2021�������ܼ�ʻ��ս����������ȣ����������Ƶĸ���������ͻ�ơ��������ϣ����켫����ս���״������“��·Эͬ”����������֮һ��“��·Эͬ”���������������һ˫“ǧ����”��һ��“˳���”��ʹ֮�ܹ��ڶ�λ������ͼ��ͬʱ��ͬ��ʶ���·��ͨ״����Ϣ�����߸��ʵĸ������ܳ�����ʶ��Ĵ����ʡ���δ����“��·Эͬ”������Ӧ�ã��ܹ��������ܼ�ʻʾ����·���ռ����ƹ㣬Ϊ����������ҵ�����µ�“������”��
2021�������ܼ�ʻ��ս��“��·Эͬ”���豸�����������¼���֧�ֵ�λ���Ƹߺ�ȫ����Ƽ���װ������������������C-V2Xͨ���źţ����ʦȫȨ�滮����RSU��·�Ԫ�����Է������е�·��ʻϰ�ߣ����������ؼ�������а�װ���ԡ�RSU·�Ԫ����̵ơ�·�ഫ�е�·����ʩ�����������ṩ��ȷ��ʵʱ��·��Ϣ��·���豸ͨ���㲥����ʱ���߿ɿ����źţ�����ȡ���ĺ��̵Ƶ�ɫ���õ�ɫʣ����������λ��Ϣ�����쳣��ͨ�¼��ȵ�·��Ϣ��֪ͨ��װ��OBU�����ص�Ԫ���豸�����ܳ�����
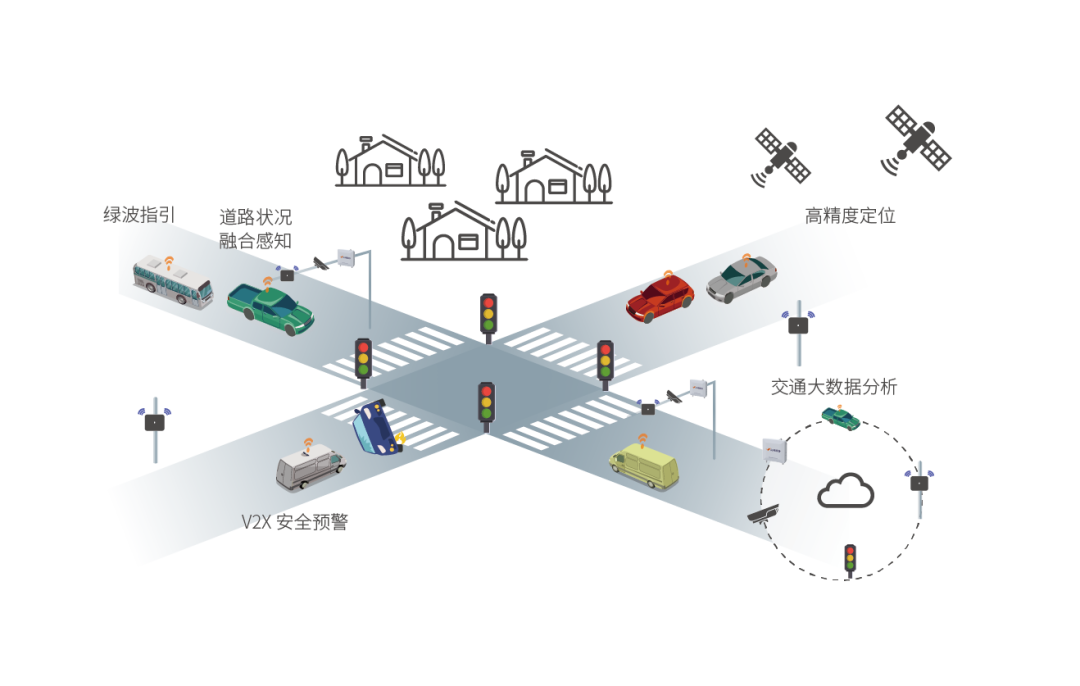
·Эͬ����������ۺ������������·״���ںϸ�֪

����·���豸��RSU��

���Ƹߺ����ܳ����նˣ�OBU��
��ֹĿǰ��Ϥ���������Ѿ�Ϊ��ʮ��֧���Ӱ�װOBU�����豸���ó��ص�ԪOBU����������ģ�鼯�ɣ�֧�ָ߾��ȶ�λ�ߵ���֧��HSMӲ�����ܣ��Ѿ�����������Ӧ��ʾ�������ǻ۽�ͨ���Զ���ʻ������ʵ�ֶ���C-V2X����Ӧ�á�
ֵ��һ����ǣ����µ�·���豸RSU�ͳ����ն�OBU���������������в������ij��漶ģ��DMD3A���ɣ���ʵ��V2X֮���ͨ�š��ÿ�C-V2X���漶ģ�����“ALL IN ON”һ�廯��ƣ���ѭ����IATF16949��������ǰװ/��װ�����ն˺�·���豸���ɡ�
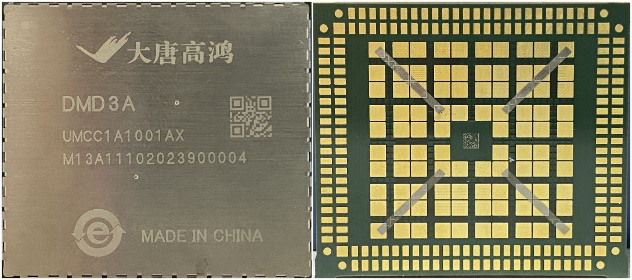
C-V2X���漶ģ��DMD3A
��2021�������ܼ�ʻ��ս���ڼ䣬“��·Эͬ”�豸���dz�����“ǧ���ۡ�˳���”���ֲ��������ܳ���֪�����IJ���ȱ�ݡ����磬�ڴ��ڵ������£��Զ���ʻ��������ͨ��C-V2X�豸��ʵʱ����ȡǰ��·�ں��̵���λ��Ϣ��ƽ���滮��ʻ·�ߡ�
�ݽ��ܣ������������ܼ�ʻ��ս���ṩ�ij����ն�OBU��·���豸RSU������������GNSS���߾��ȶ�λ��������λͬ����������֤������GNSS������£��������ȳ�������ͨ���տ�ͬ������ʵ�ֳ�������·֮���ͨ�ţ����ϰ�ȫ��ʻ��




����������£�����ı����Ѷȸ����������������������ͨ��ֽ���ֲ᷽ʽ���Ÿ��������ӣ�Ч�ʵͣ���������ǰй¶����㡣�����꼫��ʻ��ս����·����㡢;���㡢�յ㣬��������������ǰ��ȡ��ֻ���ڳ�����ʼ������ǰһ�̲��ܹ�ͨ��·���豸RSU��÷�������Ϣ�����㲥�⼸������㣬�Ӷ����Ч�ʣ���Ϣ���ӱ��ܣ����C-V2X������ͨ���豸Ҳ�Ǽ���ؿ��顣
���ϣ����켫��ʻ��ս�����õ�“��·Эͬ”����ͨ�����ܱ߽�ͨ�����ߡ��ܱ�·��ľ���Ϣ��ʾ������������������̲������������Ȼ��������������С��¹�����Ԥ����;�н����ϳ�����������ʵʱ�����ȶ������³�����ʵ��������������ȫ��������ֹ�����գ�������ս����������RSU��·�Ԫ���Ѿ���װ������ϣ���һ������ʵ��Ρ������ע�������Ŷ�̬��
��Դ���������ܼ�ʻ��ս��
 �������ܲ�ҵ����� ���ϴ����ˣ���
���Ƕ�̬ | ���ǻ�չ���ܷ�ó�ᣬע����������ȫ�»�����
�������ǡ���������쿪��Խ���Ժ���Զ����
�������������������������
�����ʻعˡ����ǿ����һ��AI�������й������������������ؼ�����������Ӧ��
�����ʻعˡ���Ӣ�� ������AIGC ����������ʱ������δ��
�����ʻعˡ��ܺ�t ��ӵ����ģ�� ��������������
�����ʻعˡ������� ���˹��������Ի��ӿ�
�����ʻعˡ���Ԫ�� ���˹����ܸ����������������ٽ��й��������ܻ�����ɫ����չ
�����ʻعˡ����˺� ���������������� ̽����������������ҵʵ��
�������ܲ�ҵ����� ���ϴ����ˣ���
���Ƕ�̬ | ���ǻ�չ���ܷ�ó�ᣬע����������ȫ�»�����
�������ǡ���������쿪��Խ���Ժ���Զ����
�������������������������
�����ʻعˡ����ǿ����һ��AI�������й������������������ؼ�����������Ӧ��
�����ʻعˡ���Ӣ�� ������AIGC ����������ʱ������δ��
�����ʻعˡ��ܺ�t ��ӵ����ģ�� ��������������
�����ʻعˡ������� ���˹��������Ի��ӿ�
�����ʻعˡ���Ԫ�� ���˹����ܸ����������������ٽ��й��������ܻ�����ɫ����չ
�����ʻعˡ����˺� ���������������� ̽����������������ҵʵ��


�������ܴ�� WORLD INTELLIGENCE CONGRESS
��ICP��17008349��-3![]() �������� 12010302002098�� �ٷ�����
�������� 12010302002098�� �ٷ�����